Tenerife, antesala de Marte
Varios científicos han probado un vehículo robótico llamado 'Bridget', una tecnología que podrá viajar en un futuro a Marte

'Bridget' viajará a Marte en el futuro(EFE)
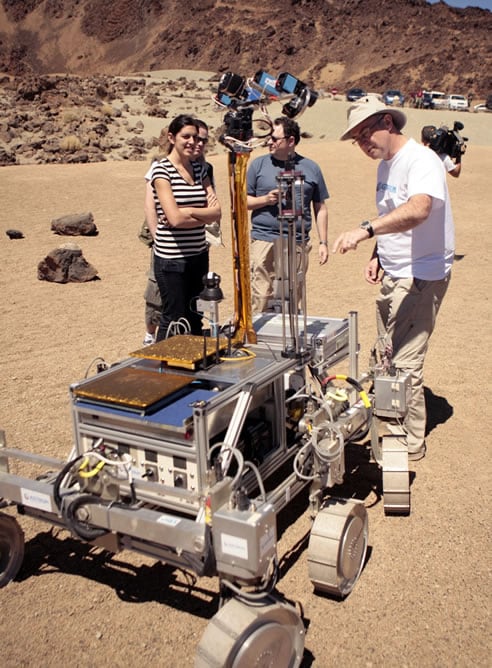
La prueba se ha realizado en el Parque Nacional del Teide y ha consistido en la colocación de cuatro cámaras en el vehículo robótico. 'Bridget' que podrá viajar en un futuro a Marte y a otros planetas con el objetivo de sacar imágenes y avanzar en el conocimiento del espacio.
La primera vez que este 'rover' pisó el parque nacional fue en 2006, año en el que se probó su mecanismo, y hoy ha servido para, en palabras de Jorgina Busquets, de Astrium, dar un paso más en el desarrollo de lo que en un futuro serán los 'ojos' del robot.
Más información
Se trata de cuatro cámaras capaces de sacar imágenes en 3D y en diferentes bandas de frecuencia para determinar la composición de los materiales y con una visión, una de ellas, de 360 grados. Estas cámaras, al igual que 'Bridget', no son las que volarán al espacio, pero sí servirán de modelo para los futuros 'rover'.
Pertenecen al proyecto de procesado en tierra de la visión robótica planetaria, Provisg, financiado por la Comisión Europea y que, según los expertos, demostrará la habilidad de Europa de desarrollar un procesado de imágenes de alto nivel en este terreno.
El Teide, un lugar representativo de la Luna o Marte
"El proyecto Provisg tiene como objetivo el desarrollo de cámaras y software de procesamiento de imágenes que van a servir para ir a otros planetas", ha constatado en rueda de prensa Busquets. Estos equipos, ha continuado, cuestan mucho dinero y antes de mandarlos a Marte o a la Luna hay que conocer bien cómo funcionan. Para ello, hay que buscar un lugar representativo, con zonas de arena, zonas más rocosas, llanuras y montañas y "eso es el Teide".
El 'rover', traído de Inglaterra, que ha servido para hacer las pruebas de campo es de aluminio, acero y plástico. Mide 1,2 metros de longitud, tiene seis ruedas y cuatro baterías que le permiten ir a 150 metros por hora y su peso oscila entre los 200 y 300 kilogramos, dependiendo de la carga que se le instale.
Además de las cámaras, 'Bridget', estos días, lleva incorporado un taladro ultrasónico, que permite tomar muestras del subsuelo.
El despegue espacial de Europa
Hasta ahora, EEUU ha estado muy involucrado en la exploración robótica y, según los expertos presentes en el Parque Nacional del Teide, Europa necesita ponerse a la par con tecnología e investigación científica de vanguardia, y 'Brigdet' es un ejemplo.
No hay ningún "rover" europeo que por el momento haya ido a Marte, aunque hay previsiones. En el caso de la misión ExoMars a Marte incluye el desarrollo de programas de exploración robótica que los más optimistas fechan en 2018.
Lo que hay ahora construidos son prototipos, como 'Bridge't y 'Bruno', otro "rover" posterior algo más avanzado y para el que se está desarrollando tecnología que posibilite que éste pueda moverse sobre el terreno en Marte o en la Luna de manera "casi autónoma".
Sobre cuándo se construirá el "rover" real, Busquets ha relatado que la Agencia Espacial Europea (ESA) y la norteamericana (NASA) están en negociaciones y desconoce lo que va a pasar.

Descubre la nueva app de Cadena SER Te ofrecemos una mejor experiencia de audio y video
DescargarNo obstante, la tecnología de las cámaras, tal y como ha explicado el ingeniero jefe de Provisg, Gerhard Paar, ya se está usando, por ejemplo, como soporte en la construcción de túneles, en Austria, y la cámara "pan cam", capaz de proporcionar pares de imágenes "stereo" (como los ojos) que se utilizan para obtener imágenes en 3D, se podría usar en la misión ExoMars en 2018.
Por su parte, Lester Waugh, jefe del proyecto en Astrium, ha recordado que estas cámaras también se podrán utilizar en caso de accidente nuclear o explosión volcánica para explorar el terreno.





